About Me
I am a passionate roboticist, constantly learning and experimenting with cutting-edge technologies. My background spans across Autonomous Vehicles, Drones and Manipulators, with impactful contributions to projects focussing on perception and motion planning for robots. I am proficient in C++/Python and have a strong foundation in Robotics. I am eager to contribute to open-source projects and to collaborate with others to solve challenging problems.
Projects
Lidar Odometry Estimation using PointNet and Spherical Projection Correspondance
Developed a learning-based odometry regression algorithm utilizing KITTI lidar dataset. Built a PointNet based architecture for dynamic object filtering and pose estimation.
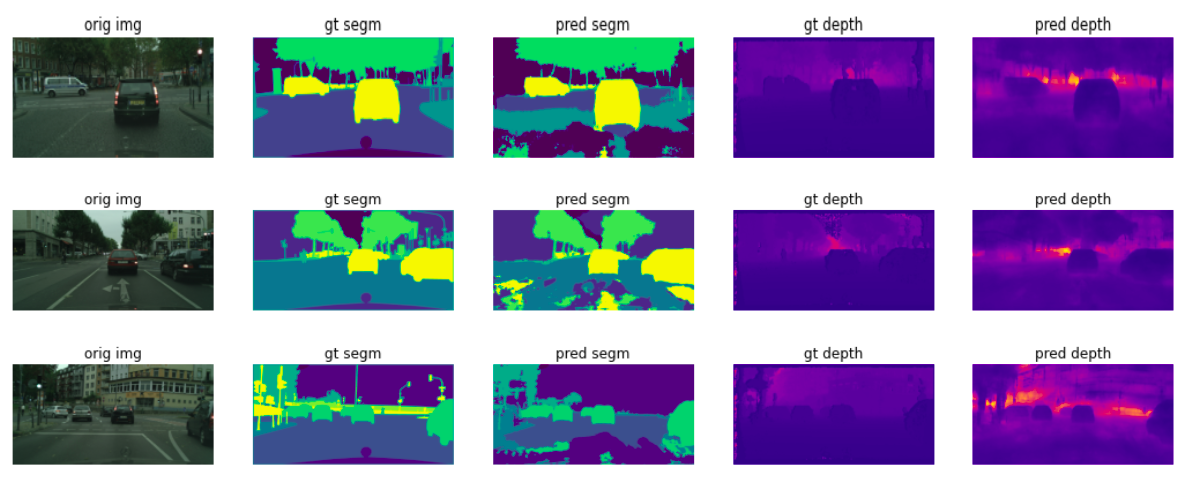
Semantic Segmentation and Depth Estimation using FCN based Multi Task Learning
Implemented and Optimized an MTL architecture to achieve real-time inference of 12 FPS. Achieved 81% MeanIOU and 4m RMSE on the CityScapes.
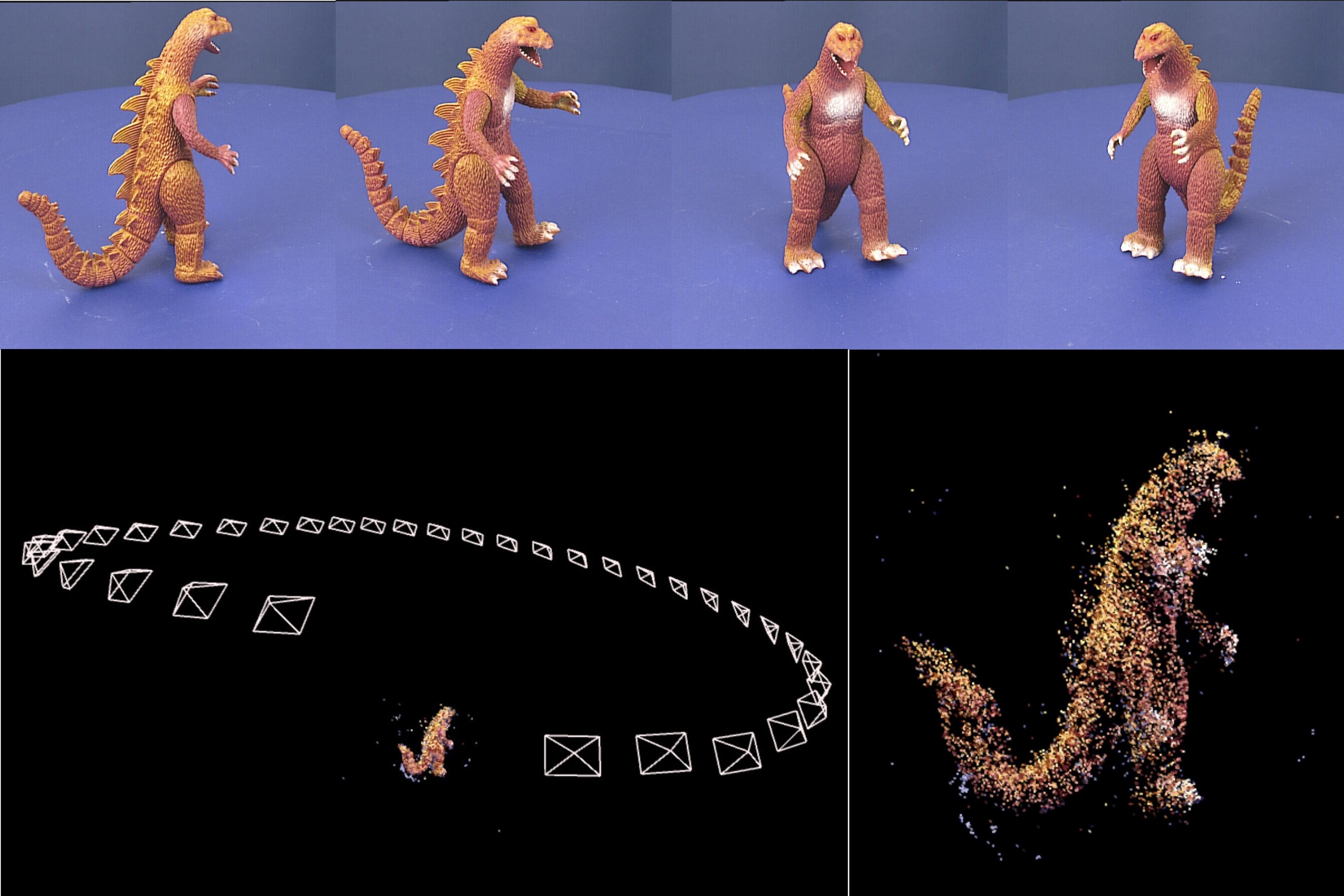
3D Reconstruction and Structure From Motion using Oxford Multi-View Dataset
Implemented sparse 3D reconstruction and structure from motion from scratch with Oxford Multi-View Dataset.
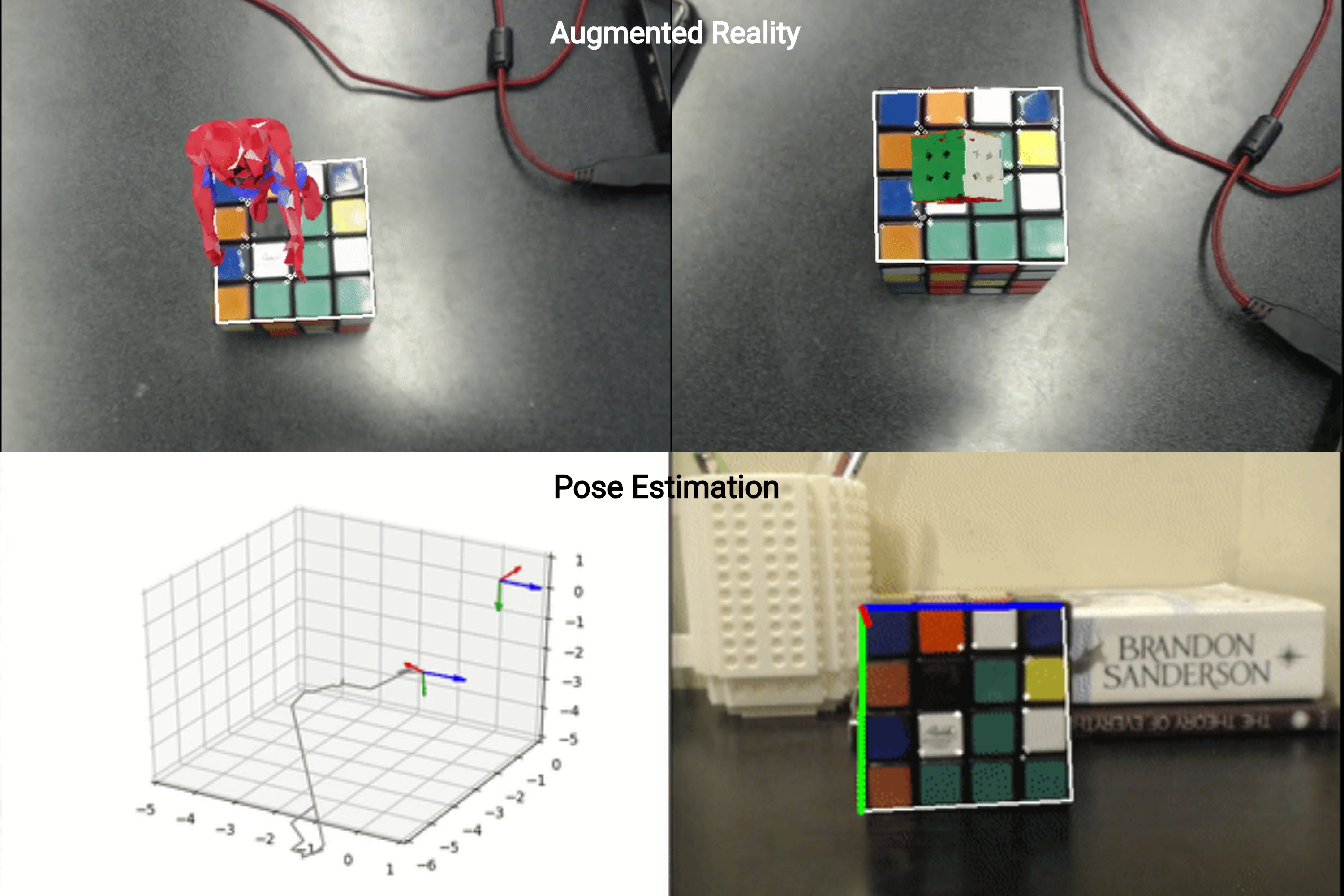
3D Pose Estimation and Augmented Reality using Rubik’s cube as fiducial
Implemented Pose Estimation and Augmented Reality using Homography and Perspective Projection with a fiducial 4x4 Rubik's cube.
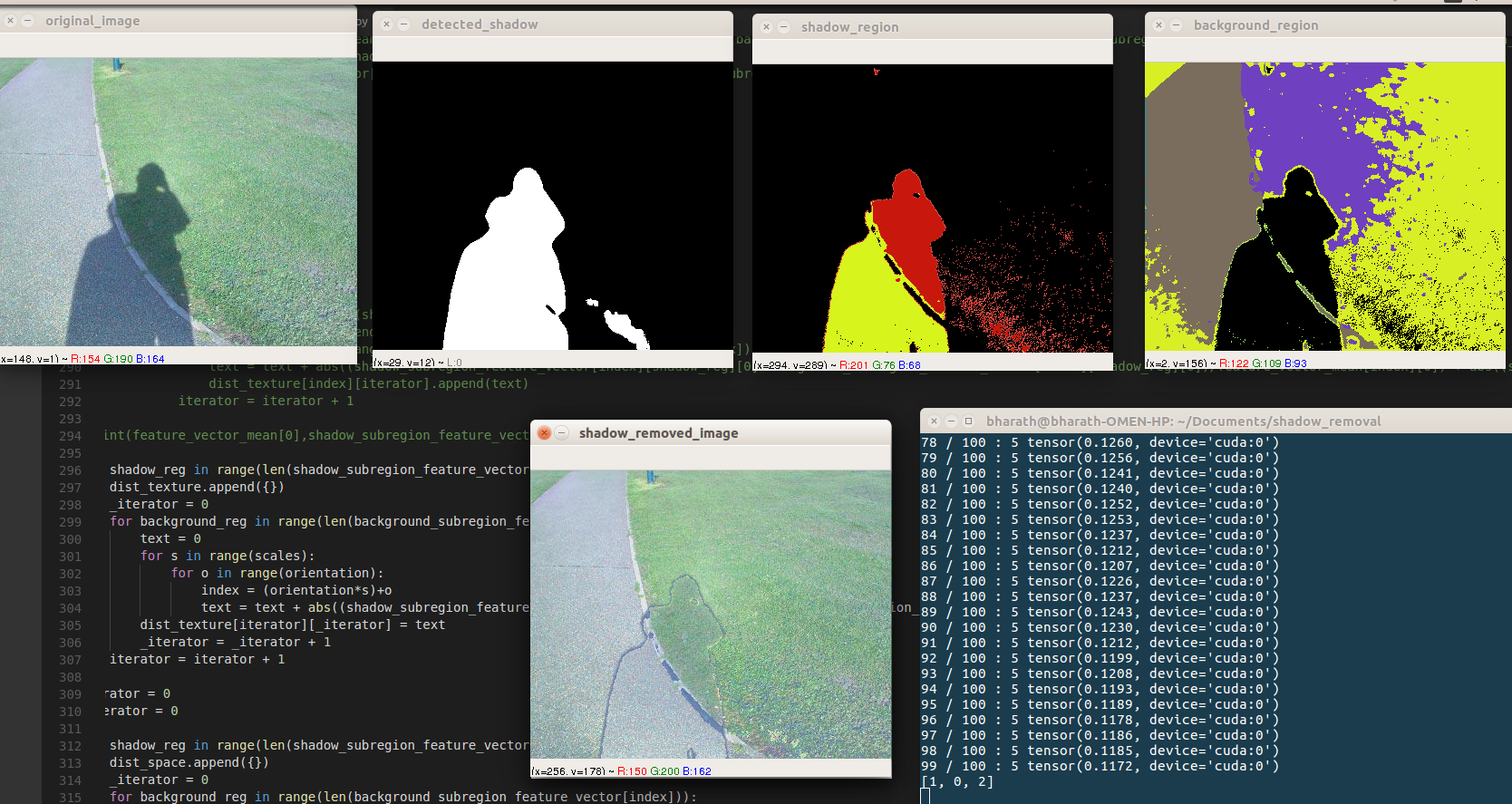
Shadow Detection and Removal using Unsupervised Segmentation
Implemented an unsupervised segmentation algorithm to segment subregions in an image. Removed shadows by transferring illuminance across segmented subregions.
Laser based SLAM for an Indoor Agricultural Robot using Gmapping
Developed a mobile robot that autonomously travels indoor environment with laser SLAM using Kinect. Built plowing, sowing and spraying mechanisms.
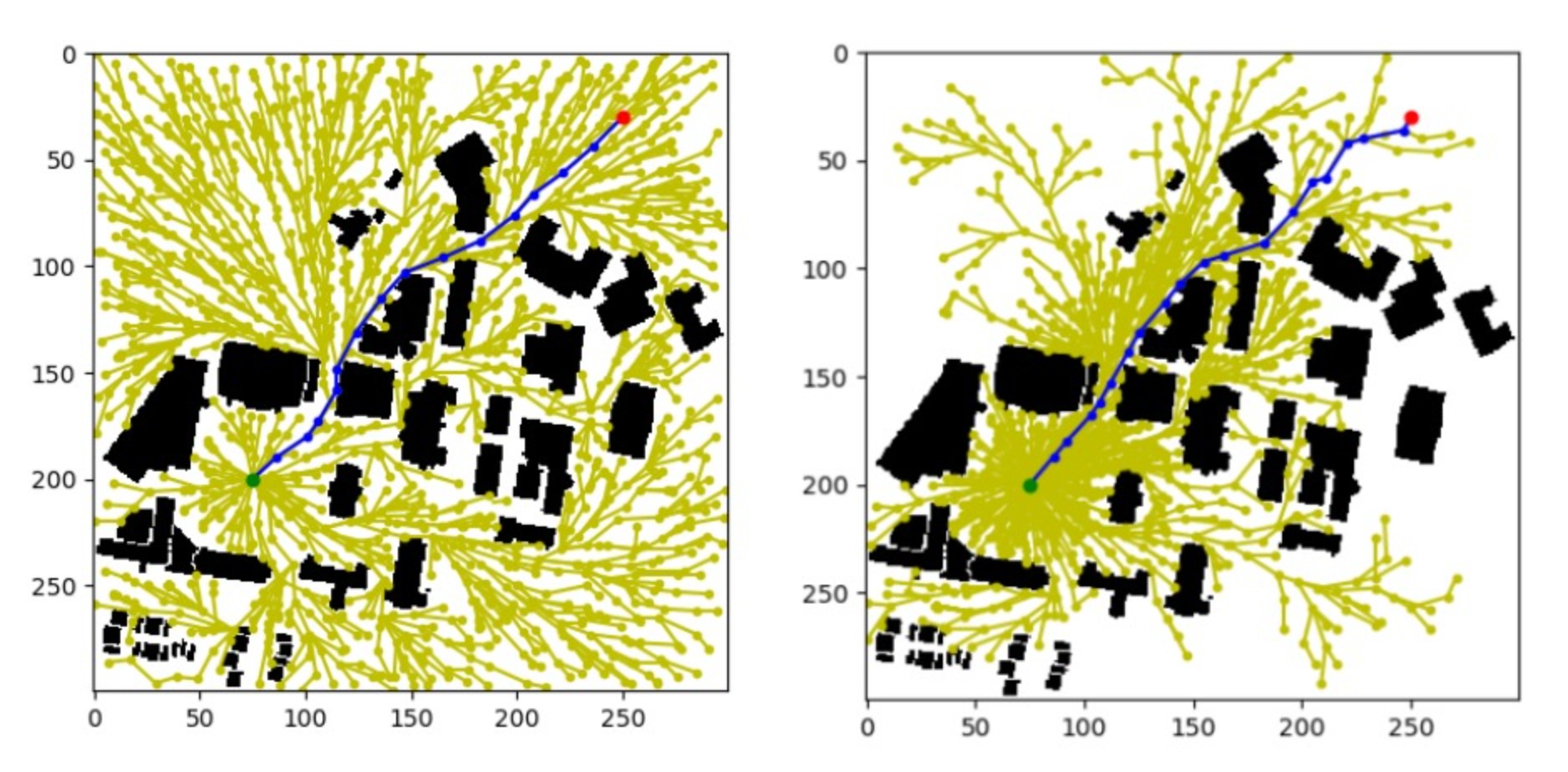
Primer on Path Planning Algorithms
Implemented various graph and sampling-based motion planning algorithms (RRT, RRT*, Informed RRT*, PRM, D*, A*, Djikstra) and performed a comparative analysis.
Education
Worcester Polytechnic Institute, Massachusetts (2021 - 2023)
Master of Science, Robotics Engineering.
National Institute of Technology Tiruchirappalli, India (2016 - 2020)
Bachelor of Technology, Instrumentation and Control Engineering.
Minor Degree, Computer Science Engineering
Work Experience

Software Engineer I, Mapping ,
Aurora, Mountain View (Jun 2023 - Present)
Engineering and maintaining the mapping sub-system for Aurora's Autonomous Vehicles. Developing 3D geometry algorithms
and infrastructure to generate offline HD maps with camera and lidar data.

Robotics Engineer ,
Flytbase, India (July 2020 - May 2021)
Developed perception and navigation systems for DJI drones in surveillance and warehouse applications.
Research Experience

Research Assistant (Nov 2021 - May 2023)
Prof. Berk Calli, Manipulation and Environmental Robotics Lab, Worcester Polytechnic Institute
Vision based Grasp Detection and Benchmarking for manipulators in pick and place applications.
Research Assistant (Aug 2022 - March 2023)
Prof. Ziming Zhang, Vision, Intelligence and Systems Lab, Worcester Polytechnic Institute
Learning-based ICP inspired visual odometry estimation using Kitti's lidar dataset.
Internship Experience

Robotics Software Intern,
Brain Corp, San Diego (Aug 2022 - Dec 2022)
Developed software for scrubber robots, integrating different components of the robot’s SLAM
system.
Software Intern, Mapping ,
Aurora, Pittsburgh (May 2022 - Aug 2022)
Researched and Implemented computational geometry and optimization algorithms for lane boundary curve fitting
in Atlas (Aurora’s offline 3D map).
Robotics Intern ,
Flytbase, India (May 2020 - July 2021)
Engineered a simulator based on Microsoft AirSim for drone navigation and perception in warehouse setting.